


立方体印刷でコーナー分に少しはみ出す現象
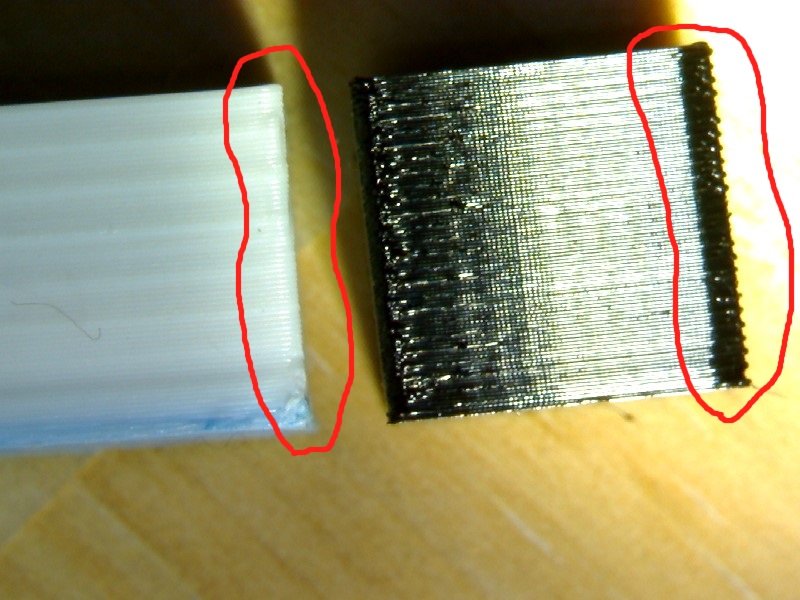
Kodama TrinusプリンタにDuet Wifiと言うボードに改造後、オリジナルでは発生していなかった、立方体印刷で縦のコーナー分に少しはみ出す現象が出ています。対応方法をハード設定含めご教授願います。
左側白がオリジナル、右側が今回改造したシステムでの印刷です。
写真は層ピッチ0.1mmですが、0.2mmにするともっと顕著に出ます。
綺麗にでるようになって良かったです。
ヘルプは確かにでないですね。気にしたこと無かったです。
私はオフィシャルサイトのトラブルシュートガイドをヘルプ代わりに使っていました。
https://www.simplify3d.com/support/print-quality-troubleshooting/
済みません。本件とは直接関係ないですが、simplify3dのヘルプを見るとき、?マークをクリックしても禁止マークが出るのですが、ヘルプを出す方法はあるでしょうか?
よろしくお願いします。
その後の経過です。
Coast at Endと言うパラメータを
0.5mm->1mm
に変更してみたところ、かなり改善されました。
ご指摘通り、Extouderより余分にフィラメントが出ていたようです。
ありがとうございました。
私の予想がはずれて残念です。
かなりスピードを落としても変化が無いとなると、エクストルーダの押し出し量が多くてはみ出している可能性もあるのかと。
simplify3Dの射出量の調整の乗数設定で、0.9とか0.8とかに小さく押し出してみてもらったら変化でてこないでしょうか。
また,四角のサイズを測ってもらい、サイズが大きい小さいなどあれば射出量の設定があってないとかなのかなと思いますが。
どうでしょうか。
回答ありがとうございます。
現状設定は下記になります。
RepRap firmwaresです。
; Drives
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S1 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S0 ; Drive 3 goes forwards
M92 X228.5714 Y228.5714 Z228.5714 E78.39 ; Set steps per mm
M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation
M566 X900 Y900 Z12 E120 ; Set Maximum instantaneous speed change (mm/min)
M203 X4200 Y4200 Z1000 E1200 ; Set maximum speeds (mm/min)
M201 X150 Y150 Z150 E150 ; Set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
いままでやったことは
1)M566のXYを半分に
変化無し
2)M201のXYを半分に
変化無し
3)温度を下げる。210->190℃
変化無し
4)積層ピッチを0.2->0.1mmにする
層が薄い分多少少ないが傾向は同じ
5)MAX印刷スピードをダウン。2400mm/min->1000mm/minへ
変化無し
と言う症状です。
これ以外なにか変更方法あるでしょうか?
よろしくお願いします。
これは、ファームウェアのアクセラレーション設定が異なるからノズルの先が角でぶれてしまって飛び出しているのかなと思います。
どのファームウェアを使っているかによって異なりますが、ファームの書き換え無しでgcodeで調整できる場合もあります。
http://reprap.org/wiki/G-code#M201:_Set_max_printing_acceleration
この辺りのコマンドを使って調整できるかも知れません。
アクセラレーション設定の説明については、
http://3dp0.com/acceleration-and-jerk/
この辺りを参考にされると良いかなと思います。